Mootorid Robootika Kodulaboris
Autor: Raivo Sell
Käesolev õpiobjekt tutvustab erinevate elektrimootorite kasutamist Robootika Kodulaboriga.
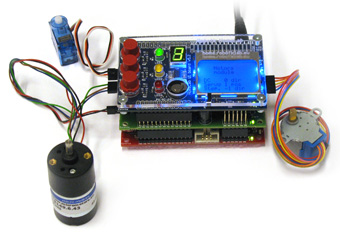
Mootorid on täiturseadmed, õigemini vaid üks osa neist, ja neidki leidub väga erinevaid, alates tööpõhimõttest ja lõpetades võimsuse ja suurusega. Robootikas on kasutusel peamiselt erinevad elektrimootorid. Elektrimootor on seade, mis muudab elektrienergia mehaaniliseks pöörlevaks energiaks ja mille töö põhineb elektromagnetismi nähtusel.
Elektrimootorite liigitamiseks on mitu erinevat viisi, kuid olulisim on mootorite jaotamine alalisvoolu ja vahelduvvoolu mootoriteks. Lisaks sellele saab elektrimootoreid liigitada harjadega ja harjadeta mootoriteks, lineaarmootoriteks ja pöördmootoriteks, nano- ja maksiskaalas mootoriteks jne. Samas on mitmed liigitused tinglikud. Näiteks lineaarliikumine saadakse tihti ikkagi pöörleva elektrimootori abil, mis on integreeritud ühte korpusesse kruvimehhanismiga ja käsitletakse nii lineaartäiturina. Käesolevas õpiobjektis on tähelepanu pööratud kolmele enimlevinud elektrimootorile robootikas: püsimagnetiga alalisvoolu mootor, RC (radio-controlled)) servomootor ja samm-mootor.

Õpiobjekti nimi: Mootorid Robootika Kodulaboris
Õpiväljundid:
Pärast mooduli läbimist õpilane:
- Kirjeldab erinevaid elektrimootoreid ja nende tööprintsiipi
- Kirjeldab H-silla tööpõhimõtet
- Kirjeldab servomootori juhtsignaali
- Kirjeldab samm-mootori juhtsignaali
- Ühendab vajalikud moodulid õigesti
Kasutusjuhend:
- Teoreetilise taustamaterjaliga tutvumine
- Õppevideo vaatamine
- Enesekontrolli küsimustele vastamine
Õpetatav osa: Lugeda teoreetilist ülevaadet enne riistvara reaalset ühendamist ja pingestamist. Vaadata õpivideosid korrektse riistvara käsitlemise tagamiseks. Õpitu kinnistamiseks tuleb praktilised näited reaalselt läbi teha.
Seoste loomine: Läbi õppevideo ja sõnalise selgituse järgimise.
Kinnistav osa: Iseseisev praktika reaalse riistvarakomplekti baasil.
TEOREETILINE OSA
Elektrimootorid
Alalisvoolu mootor
Püsimagnetiga alalisvoolumootorid on laialt levinud erinevates rakendustes, kus olulised on väikesed mõõtmed, suur võimsus ja madal hind. Nende suhteliselt suure pöörlemiskiiruse tõttu kasutatakse neid tihti koos ülekandega (reduktoriga) madalama kiiruse ja suurema pöördemomendi saavutamiseks.
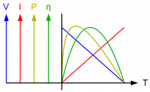
Püsimagnetiga alalisvoolumootorid on lihtsa ehitusega ja elementaarse juhtimisega mootorid. Kuigi juhtimine on lihtne, ei ole nende pöörlemiskiirus üldjuhul täpselt juhtsignaaliga määratletav, sest see sõltub mitmetest teguritest, eelkõige võllile rakendatavast koormusest ja toitepingest. Ideaalse alalisvoolumootori jõumomendi ja kiiruse suhe on lineaarne, mis tähendab seda, et mida suurem koormus on võllil, seda madalam on kiirus ja seda suurem on mähist läbiv vool.

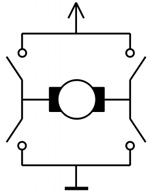
Harjadega alalisvoolumootorid töötavad alalispingel ning põhimõtteliselt ei vaja eraldi juhtelektroonikat, kuna kogu vajalik kommutatsioon toimub mootori sees. Mootori töötamise ajal libisevad kaks staatilist harja rootori pöörleval kommutaatoril ning hoiavad mähiseid pinge all. Mootori pöörlemissuuna määrab toitepinge polaarsus. Kui mootorit on vaja juhtida ainult ühes suunas, võib toitevoolu anda relee või muu lihtsa lülitusega, kui mõlemat pidi, siis kasutatakse H-silla-nimelist elektriskeemi. H-sillas tüürivad mootori pöörlemiseks vajalikku voolu neli transistori (või nende gruppi). H-silla elektriskeem meenutab H-tähte - sellest ka nimi. H-silla eripära seisneb mootorile mõlemat pidi polaarsuse rakendamise võimaluses. Kõrvaloleval pildil on toodud H-silla põhimõtteskeem lülitite näitel. Kui selles skeemis sulgeda kaks diagonaalis asetsevat lülitit, hakkab mootor tööle. Mootori pöörlemissuund sõltub aga sellest, kummas diagonaalis lülitid suletakse. Reaalses H-sillas on lülitite asemel muidugi transistorid, mis on valitud vastavalt mootori voolule ja pingele.
H-sillaga saab peale pöörlemissuuna muuta ka mootori pöörlemiskiirust - selleks tuleb transistore pulsilaiusmodulatsiooniga (PWM) pidevalt avada ja sulgeda, nii et summaarne mootorile antav energia on midagi seismise ja täisvõimsuse vahepealset. Avatud aega kogu PWM perioodist nimetatakse ka töötsükliks (inglise keeles duty cycle), mida tähistatakse protsentidega. 0% tähendab, et transistor on pidevalt suletud, ehk ei juhi voolu, 100% tähendab, et transistor on pidevalt avatud, ehk juhib voolu. PWM sagedus peab olema piisavalt kõrge, et vältida mootorivõlli vibreerimist. Madalal sagedusel tekitab mootor lisaks ka müra ja seepärast kasutatakse enamasti üle 20 kHz moduleerimissagedust. Samas kannatab väga suurtel sagedustel H-silla efektiivsus. Mootorivõlli vibreerimist vähendavad ka rootori inerts ja mootori mähiste induktiivsus. Väiksemate voolude juhtimiseks leiab H-sildu integreeritud komponendina ehk ajurina, suuremate voolude jaoks kasutatakse spetsiaalseid võimsustransistore (Power MOSFET). H-silda koos sinna kuuluva elektroonikaga nimetatakse ka mootorikontrolleriks.
Märkus: Mitte ajada segamini RC (raadiojuhitav servomootor) PWM signaali tavaliste PWM signaalidega.
RC servo mootor

RC (lühend, inglise keeles radio-controlled) servomootor on mudelismis ja robootikas laialt levinud täiturmehhanism, mis koosneb väikesest alalisvoolu mootorist, hammasreduktorist ja juhtloogikast. Servomootori rootor liigub üldjuhul mingisse kindlasse asendisse ja üritab siis seda asendit püsivalt hoida. Rootori asend sõltub servomootorile etteantavast juhtsignaalist. Sõltuvalt mootori tüübist võib maksimaalne pöördenurk olla erinev. Harvem esineb pideva pöörlemisega servomootoreid. Sellisel juhul määrab juhtsignaal mitte rootori asendi, vaid pöörlemiskiiruse. Levinud on ka servomootori nn. häkkimine, mille käigus asendit määrav servomootor tehakse ümber pidevalt pöörlevaks. Sisuliselt tähendab see, et asendist tagasisidet andev potentsiomeeter asendatakse kahe fikseeritud takistiga ja eemaldatakse hammasrattalt täispööret takistav mehaaniline takistus. Servomootori üks oluline tunnus on tema hea kaalu ja võimsuse suhe.
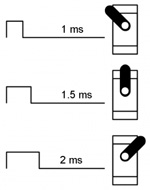
Servomootori juhtsignaaliks on spetsiifiline pulsilaiusmodulatsiooni (PWM) signaal, kus pulsi laius määrab ära rootori asendi. Signaali perioodiks on 20 ms (sagedus 50 Hz) ja kõrge poolperioodi laiuseks 1-2 ms. 1 ms tähistab rootori üht äärmist asendit ja 2 ms teist rootori äärmist asendit. 1,5 ms tähistab rootori keskasendit.
Traditsiooniline RC servomootor kannab ka analoog-servomootori nime. Põhjus on selles, et viimasel kümnendil tekkisid ka nii-öelda digitaalsed servomootorid. Nende kahe vahe seisneb selles, et analoog-servomootoris juhitakse mootorit sellesama 50 Hz PWM sisendsignaaliga, digitaal-servomootoris juhib mootorit aga eraldi mikrokontroller palju kõrgema sagedusega. Sisendsignaal on digitaalsel servomootoril küll sama, kuid kõrgem mootori moduleerimissagedus võimaldab täpsemat ja kiiremat asendi määramist.
Samm-mootor

Samm-mootoreid kasutatakse laialdaselt täpsust nõudvates rakendustes. Erinevalt alalisvoolumootorist puuduvad samm-mootoris harjad ja kommutaator - selleks on seal mitu eraldiseisvat mähist, mida kommuteeritakse välise elektroonikaga (ajuriga). Rootori pööramine toimub mähiseid sammhaaval kommuteerides, ilma tagasisideta. Siit avaldub ka üks samm-mootorite puudus - mehhaanilise ülekoormuse korral, kui rootor ei pöörle, lähevad sammud sassi ja liikumine muutub ebatäpseks. Mähiste järgi eristatakse kahte liiki samm-mootoreid: unipolaarsed- ja bipolaarsed samm-mootorid. Ehituse järgi jaotatakse neid veel kolmeks:
- muutuva magnetilise takistusega (suur täpsus, madal pöördemoment, madal hind)
- püsimagnetiga (madal täpsus, kõrge pöördemoment, madal hind)
- hübriidne (suur täpsus, kõrge pöördemoment, kõrge hind)
Muutuva magnetilise takistusega samm-mootorites on hambulised mähised ja hambuline rauast rootor. Suurim tõmbejõud tekib mõlema poole hammaste kattumisel. Püsimagnetiga samm-mootorites on, nagu nimigi ütleb, püsimagnet, mis orienteerub vastavalt mähise polaarsusele. Hübriidides on kasutusel mõlemad tehnoloogiad.
Sõltuvalt samm-mootori mudelist läheb mootori võlli ühe täispöörde (360 kraadi) tegemiseks vaja sadu kommuteerimissamme. Stabiilse ja sujuva liikumise tagamiseks kasutatakse sobivat juhtelektroonikat, mis juhib mootorit vastavalt selle parameetritele (rootori inerts, pöördemoment, resonants jne.). Lisaks võib juhtelektroonikas rakendada erinevaid kommuteerimise meetodeid. Järjest ühe mähise kaupa kommuteerimist nimetatakse täissammuks, kuid vaheldumisi ühe ja kahe mähise kommuteerimist nimetatakse poolsammuks. Kasutatakse ka sinusoidaalset mikrosammu, mis annab eriti täpse ja sujuva juhtimise.
Unipolaarne samm-mootor
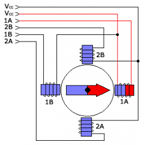
Unipolaarne samm-mootor on viie või kuue juhtmega. Vastavalt ajami skeemile käivitatakse korraga ainult üks neljandik mähistest. Vcc liinid on tavaliselt ühendatud mootori positiivse toitepingega. Mähiste otsad 1a, 1b, 2a, ja 2b ühendatakse kommuteerimisel läbi transistoride ainult maaga, mistõttu nende juhtelektroonika on suhteliselt lihtne.
Bipolaarne samm-mootor
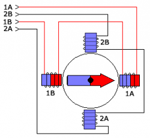
Bipolaarne samm-mootor erineb unipolaarsest samm-mootorist selle poolest, et mähiste polaarsust muudetakse kommutatsiooni ajal. Korraga aktiveeritakse pooled mähised, mis tagab võrreldes unipolaarse samm-mootoritega suurema efektiivsuse. Bipolaarsetel samm-mootoritel on neli juhet, mis ühendatakse kõik eraldi poolsillaga. Kommuteerimisel rakendavad poolsillad mähiste otstele kas positiivset või negatiivset pinget. Unipolaarseid samm-mootoreid saab käivitada ka bipolaarse ajuri abil: selleks tuleb ühendada vaid mähiste liinid 1a, 1b, 2a ja 2b (Vcc jääb ühendamata).
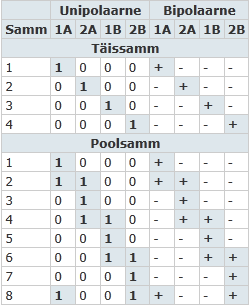
Mõlemat liiki mähisega samm-mootori juhtimiseks vajalikku kommutatsiooni täissammu ja poolsammu režiimis kujutab järgnev tabel. Kuna unipolaarsete samm-mootorite ajurite puhul toimub vaid transistoride avamine, siis nende samme on kujutatud loogiliste arvudega 0 ja 1. Bipolaarse samm-mootori juhtimine võib vajada rohkem signaale, ja selle samme on kujutatud ajuri väljundite polaarsusega.
NÄITEKOODID
Alalisvoolumootor
Koodi tekstiversioon
Servomootor
Koodi tekstiversioon
Samm-mootor
Koodi tekstiversioon
LISAMATERJAL
- Robootika Kodulabor - Alalisvoolumootor
- Robootika Kodulabor - Servomootor
- Robootika Kodulabor - Samm-mootor
- Robootika Kodulabor - Kontrollerplaadi andmeleht
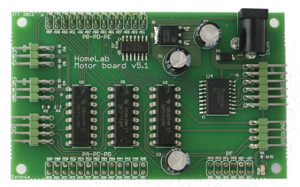
- Robootika Kodulabor - Mootorite mooduli andmeleht
Teoreetilise osa algtekstide autor: Raivo Sell ja Mikk Leini